The Traffic Alert and Collision Avoidance System (TCAS) is an Airborne Avionics System designed to reduce the risk of mid-air collisions (MAC) between aircraft. TCAS is based on secondary surveillance radar (SSR) transponder signals, but It operates independently of ground-based air traffic control (ATC) by monitoring the airspace for nearby aircraft equipped with active transponders. TCAS alerts pilots to potential threats and, in advanced versions, provides instructions to avoid collisions.
ICAO definition of TCAS:
An aircraft system based on secondary sumeillance radar (SSR) transponder signals which operates independently of ground-based equipment to provide advice to the pilot on potential conflicting aircraft that are equipped with SSR transponders. (Source: ICAO Annex 10, vol. IV)
ACAS vs. TCAS
In the international arena, this TCAS system is known as the Airborne Collision Avoidance System (ACAS). TCAS is a type of ACAS. Although the terms ACAS and TCAS are often used interchangeably, there is a difference between the two terms:
- ACAS is typically used when referring to the technical standard or concept;
- TCAS is typically used when referring to a current implementation of the technical standards and concept, which is widely fitted throughout the world.
Currently, TCAS II version 7.1 is the only implementation that fully meets the ACAS II ICAO Standards. ACAS II tracks aircraft in the surrounding airspace through replies from their ATC transponders.
Now, The work is ongoing at ICAO to update the relevant provisions to include ACAS Xa. Once these updates have been approved by member states and are effective, ACAS Xa would become another ICAO-recognised airborne collision avoidance system.
ACAS Standards
Three types of ACAS have been specified in ICAO Annex 10:
- ACAS I provides information as an aid to “see and avoid” action but does not include the capability for generating RAs;
- ACAS II provides vertical RAs in addition to TAs;
- ACAS III provides vertical and horizontal RAs in addition to TAs.
So far, ACAS III has not materialized due to limitations that conventional surveillance systems have with horizontal tracking and, consequently, issuing horizontal avoidance maneuvers. ACAS III has been mentioned as a future system in the current edition of ICAO Annex 10 but there have been no ICAO standards for ACAS III.
Development of TCAS
The development of the Traffic Alert and Collision Avoidance System (TCAS) was spurred by a mid-air collision in 1956 and has gone through several iterations to arrive at the current TCAS II Version 7.1. Here is a summary of its history:
- Early collision avoidance development in the late 1950s and early 1960s focused on passive and non-cooperating systems but these proved impractical.
- The concept of Tau was introduced, using time to the closest point of approach (CPA) instead of distance.
- In the late 1960s and early 1970s, several manufacturers developed collision avoidance systems based on interrogator/transponder and time/frequency techniques, but they generated too many unnecessary alarms in dense terminal areas.
- The Beacon Collision Avoidance System (BCAS) was developed in the mid-1970s, using Air Traffic Control Radar Beacon System (ATCRBS) transponders to determine an intruder’s range and altitude.
- TCAS development began in 1981, utilizing the basic BCAS design, and is designed to work independently of the aircraft navigation equipment and ground systems used for Air Traffic Control (ATC) services.
- TCAS I provides traffic advisories (TAs) to assist pilots in visually acquiring intruder aircraft and is mandated for use in the U.S. for turbine-powered, passenger-carrying aircraft having more than 10 and less than 31 seats.
- TCAS II provides TAs and resolution advisories (RAs) which recommend vertical maneuvers to maintain separation and is mandated in the U.S. for commercial aircraft with more than 30 seats or a maximum takeoff weight greater than 33,000 lbs.
- Initial In-Service Evaluations were conducted, including tests by Piedmont Airlines, to evaluate the performance of TCAS, which led to improvements in the system’s algorithms and displays.
- Version 6.0 of the TCAS II Minimum Operational Performance Standards (MOPS) was published in 1989 and put into full-time revenue service in the U.S. in 1990.
- The TCAS Transition Program (TTP) was initiated in 1991 to evaluate TCAS operations.
- Version 6.04a of the TCAS II MOPS was published in 1993, with the primary aim of reducing nuisance alerts at low altitudes and during level-off maneuvers.
- Version 7.0 was developed to reduce the number of RAs issued and minimize altitude displacement while responding to an RA. It included changes to the collision avoidance algorithms, aural annunciations, RA displays, and pilot training programs and began to be installed voluntarily in the U.S. in 1999.
- Version 7.1 was developed to improve RA logic, specifically in vertical chase situations, and all “Adjust Vertical Speed, Adjust” RAs were converted to “Level-Off, Level-Off” RAs. It is now operational between 2010 and 2011.
- Worldwide carriage requirements were established, with the U.S. being the first ICAO member state to mandate TCAS II, and ICAO mandating the carriage of ACAS II on all aircraft beginning in 2003.
The development of TCAS has been a long process with many revisions and improvements. The system’s current form is the result of years of analysis, simulations, testing, and operational experience.
Types of TCAS
All TCAS systems provide some degree of collision threat alerting and a traffic display. TCAS I and TCAS II differ primarily in their alerting capability.
1. TCAS I
- TCAS I is a less capable system than the modern TCAS II system.
- Provides Traffic Advisories (TA) to alert pilots when another aircraft is in close proximity.
- Announces “Traffic, traffic” to warn the pilot, but does not suggest any specific actions.
- Pilots rely on their judgment and Air Traffic Control for decisions.
- Declares “Clear of conflict” once the threat has passed.
- Used primarily in smaller aircraft and some regional jets.
- TCAS I is mandated for use in the U.S. for turbine-powered, passenger-carrying aircraft having more than 10 and less than 31 seats.
2. TCAS II
- Includes all features of TCAS I and Additionally offers Resolution Advisories (RA) with specific instructions to avoid collisions.
- Offers both TAs and RAs.
- TAs are nominally generated 20 to 48 seconds prior to CPA or 10 to 13 seconds before RA, although shorter generation times are possible in some geometries.
- RAs are typically generated 15 to 35 seconds prior to the CPA (depending on altitude), although shorter generation times are possible in some geometries.
- Tracks the relative motion of aircraft and calculates the necessary vertical maneuvers to avoid collisions.
- Communicates with other TCAS-equipped aircraft to coordinate avoidance maneuvers.
- Corrective RA examples: “Descend, descend”, “Climb, climb”, and “Level off, level off” (suggests reducing vertical speed).
- Preventive RA examples: “Monitor vertical speed” and “Maintain vertical speed, Maintain” (advises not to change current vertical speed).
- TCAS II is mandated by the U.S. for commercial aircraft, including regional airline aircraft with more than 30 seats or a maximum takeoff weight greater than 33,000 lbs.
TCAS II has undergone several updates and improvements:
- Version 6.0 and 6.04a: These were early versions of TCAS II implemented after a congressional mandate required certain aircraft to be equipped with TCAS II. Version 6.04a aimed to reduce nuisance alerts and correct altitude crossing logic.
- Version 7.0: This version introduced numerous changes to reduce the number of RAs issued and minimize altitude displacement, including horizontal miss distance filtering and more sophisticated multi-threat logic.
- Version 7.1: This version improves the RA logic, particularly in vertical chase situations, and converts “Adjust Vertical Speed, Adjust” RAs to “Level-Off, Level-Off” RAs.
The TCAS concept makes use of the same radar beacon transponders installed on aircraft to operate with ATC’s ground-based radars. The level of protection provided by TCAS depends on the type of transponder the target aircraft is using. Here’s a breakdown:
| Target Aircraft Equipment | TCAS I | TCAS II |
| Mode A XPDR ONLY | TA | TA |
| Mode C or Mode S XPDR | TA | TA and Vertical RA |
| TCAS I | TA | TA and Vertical RA |
| TCAS II | TA | TA and Coordinated Vertical RA |
It is important to note that TCAS provides no protection against aircraft that do not have an operating transponder.
TCAS II Standardization
- Set of standards defined by aviation standard development organizations
- US: RTCA in the form of TCAS Minimum Operational Performance Standards (MOPS)
- Europe: European Organization for Civil Aviation Equipment (EUROCAE)
- Internationally: ICAO in the form of ACAS Standards and Recommended Practices (SARPS)
- Includes resolution advisories (RA) if a collision is imminent instructing flight crews to descend or ascend to escape maneuvers in the vertical dimension
- Version 6.04a specified in RTCA DO-185 (Mandated in the US: 12-1-1994)
- Version 7 specified in RTCA DO-185a (allowed in the US (required RVSM airspace), ICAO Mandate: 1-1-2003)
- Version 7.1 specified in RTCA DO-185b (ICAO Mandate: 1-1-2014 new, 1-1-2017 retrofit)
- Europe: The carriage of ACAS II has been mandatory from 1-1-2005 (updated v7.1 from 12-1-2015 all required aircraft) for all civilian turbine-engined aircraft carrying more than 19 passengers or with the maximum take-off mass more than 5700 kg, with the exception of unmanned aircraft systems
- US: TCAS II has been mandatory in US airspace since 1994, for all civilian turbine-engined aircraft carrying more than 30 passengers
System Components
TCAS II comprises several key components that work together to provide collision avoidance.
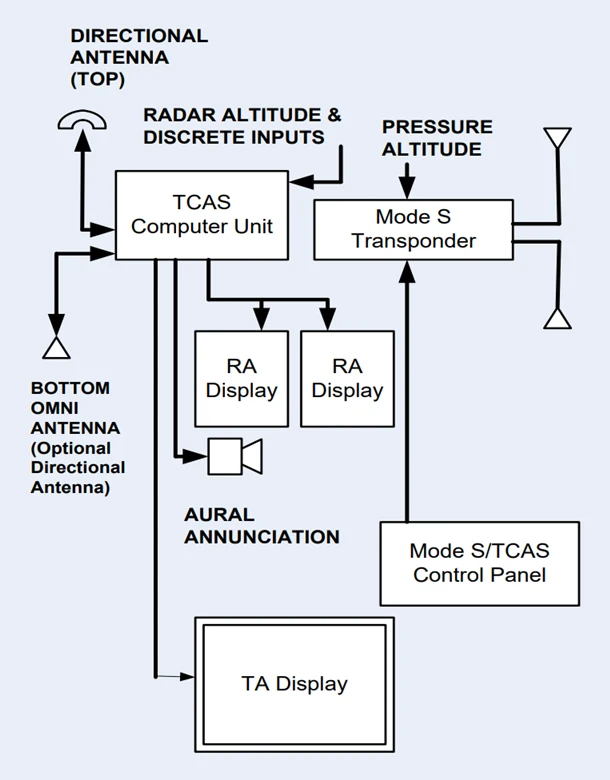
These components include:
TCAS Computer Unit
Also called the TCAS Processor, this unit is responsible for airspace surveillance, intruder tracking, own aircraft altitude tracking, threat detection, and the selection of Resolution Advisory (RA) maneuvers. It also generates the necessary advisories. The TCAS processor uses inputs from the aircraft such as pressure altitude, radar altitude, and discrete aircraft status to control the collision avoidance logic and determine the protected volume around the aircraft. If a tracked aircraft requires an avoidance maneuver, the processor selects one that provides adequate vertical separation while minimizing changes to the existing flight path.
Mode S Transponder
A Mode S transponder is essential for TCAS II to operate. It supports the ground-based ATC system and can work with either an ATCRBS or a Mode S ground sensor. The Mode S transponder also enables air-to-air data exchange between TCAS-equipped aircraft, allowing for coordinated, complementary RAs. If the Mode S transponder fails, the TCAS Performance Monitor will detect this and automatically place TCAS into Standby.
Mode S/TCAS Control Panel
This control panel allows the flight crew to select and control all TCAS equipment, including the TCAS Processor, the Mode S transponder, and sometimes the TCAS displays. A typical control panel has four basic control positions:
- Stand-by: Power is applied to the TCAS Processor and the Mode S transponder, but TCAS does not issue any interrogations and the transponder replies only to discrete interrogations. The transponder still transmits squitters.
- Transponder: The Mode S transponder is fully operational and replies to all appropriate ground and TCAS interrogations, but TCAS remains in Stand-by.
- TA Only: The Mode S transponder is fully operational, and TCAS operates normally, performing all tracking functions and issuing traffic advisories (TAs) but inhibits resolution advisories (RAs).
- Automatic or TA/RA: The Mode S transponder is fully operational and TCAS operates normally, issuing both TAs and RAs when necessary. All TCAS control signals are routed through the Mode S transponder.
TCAS Antennas
TCAS II uses a directional antenna on the top of the aircraft and either an omni-directional or directional antenna on the bottom. Most installations use a directional antenna on the bottom of the aircraft. These antennas transmit interrogations at 1030 MHz and receive transponder replies at 1090 MHz. The directional antennas help reduce synchronous garbling. The Mode S transponder also uses two antennas, one on the top and one on the bottom of the aircraft.
New systems (transponder-TCAS integrated systems) may use only two antennas, shared by the transponder and TCAS. A suppression bus disables one unit when the other is transmitting because both the TCAS unit and the transponder generate transmission signals at the receiver frequency of the other.
Cockpit Presentation
TCAS provides information to the pilots through two displays: the traffic display and the RA display. These can be integrated into a single unit.
Traffic Display
Depicts the position of nearby traffic relative to the aircraft, including vertical speed, and Proximate, TA, and RA status. The primary purpose is to aid the flight crew in visually acquiring transponder-equipped aircraft and to provide confidence in system operation. The display automatically activates when a TA or RA is issued. The traffic display uses different symbols to represent traffic, including: unfilled diamonds for “other” traffic, filled diamonds for proximate traffic, filled amber or yellow circles for TAs, and filled red squares for RAs.
Current implementations of the traffic display include dedicated traffic displays and shared displays, such as weather radar displays and navigation displays (ND)
Resolution Advisory (RA) Display
This display provides information on the vertical speed or pitch angle to fly to resolve an encounter. It can be implemented on an instantaneous vertical speed indicator (IVSI), a vertical speed tape, or using pitch cues on the Primary Flight Display (PFD). It uses red and green lights or markings to indicate vertical speeds to be avoided and the desired vertical speed.
How TCAS Works
The traffic alert and collision avoidance system (TCAS) helps the flight crew maintain safe air traffic separation from other ATC transponder equipped airplanes. TCAS is an airborne system and operates independently of the ground-based ATC system.
TCAS is based on Secondary Surveillance Radar (SSR) technology and uses interrogations of transponders on nearby aircraft to calculate range, bearing, and altitude. With this information, TCAS predicts the Closest Point of Approach (CPA) and determines the risk of a collision.
TCAS sends interrogation signals to nearby airplanes. These airplanes which are equipped with an air traffic control radar beacon system (ATCRBS) transponder or an air traffic control (ATC) mode S transponder respond to these interrogations. TCAS uses these response signals to calculate the range, relative bearing, and altitude of the responding airplane. If a responding airplane does not report altitude, TCAS cannot calculate the altitude of that airplane. Airplanes tracked by TCAS are called targets. Using the information from the response signals and altitude of own airplane, TCAS calculates the relative movement between own airplane and the target. TCAS then calculates how close the target will be to own airplane at the closest point of approach (CPA). Targets are classified as one of these four types depending on the separation at CPA and the time it will take until CPA occurs:
- Other Traffic: No immediate threat.
- Proximate Traffic: Nearby but not dangerous.
- Intruders: This may require increased awareness.
- Threats: Poses collision risk; triggers advisories.
Each type of target has a different symbol on the display. If the separation at CPA is within certain limits, TCAS provides advisory messages to the flight crew. TCAS provides two levels of advisories to the flight crew, traffic advisory (TA) and resolution advisory (RA). The type of advisory is determined by a combination of altitude, the time to CPA, and the separation at CPA. The TA shows for relatively longer times to CPA and relatively larger separation at CPA and is for intruder targets. The RA shows for relatively shorter times to CPA and relatively smaller separation at CPA and is for threat targets. The TA shows the range, bearing, and relative altitude (if relative altitude is known) of the intruder target. The RA also gives visual and aural commands to the flight crew to make sure there is safe vertical separation from the threat target.
Future of TCAS
The future of TCAS (Traffic Alert and Collision Avoidance System) involves the development and implementation of the ACAS X family of systems, which are intended to eventually replace the current TCAS II. ACAS X aims to improve safety and reduce unnecessary alerts, and adapt to future operational concepts.
ACAS X refers to a family of new Airborne Collision Avoidance Systems that are currently under development. It is designed to take advantage of recent advances in computer science techniques such as ‘dynamic programming’. The ACAS X family includes several variants:
- ACAS Xa is the general-purpose system and successor to TCAS II. It uses active interrogations to detect intruders.
- ACAS Xo is an extension of ACAS Xa designed for specific operations like closely spaced parallel approaches.
- ACAS Xu is designed for Remotely Piloted Aircraft Systems (RPAS), and incorporates horizontal resolution maneuvers.
- ACAS sXu is an extension of ACAS Xu intended for small Remotely Piloted Aircraft Systems (RPAS).
- ACAS Xr is intended for rotorcraft (helicopters).
- ACAS Xp relies solely on passive ADS-B to track intruders and is intended for general aviation aircraft.
ACAS X is intended to improve safety while reducing unnecessary alerts.
- Improved Logic: ACAS X systems use a numeric lookup table optimized with respect to a probabilistic model of the airspace and a set of safety and operational considerations, unlike TCAS II which is based on a fixed set of rules. This allows for a more adaptable and optimized collision avoidance system.
- Enhanced Surveillance: ACAS X is designed to take advantage of new surveillance sources, especially satellite-based navigation and advanced ADS-B functionality, unlike TCAS II which relies solely on transponders.
- Reduced Unnecessary Alerts: One of the primary design objectives of ACAS Xa is to improve safety while reducing the rate of unnecessary alerts. TCAS II can generate alerts even in situations where aircraft will remain safely separated.
- Adaptability: ACAS X is designed to be adaptable to future operational concepts, such as those being developed under SESAR (Single European Sky ATM Research Programme) and NextGen (Next Generation Transportation System). These programs plan to reduce the spacing between aircraft, and TCAS II may not be compatible with such concepts.
- Wider Applicability: ACAS X is intended to extend collision avoidance to other classes of aircraft, such as General Aviation (GA) and Unmanned Aircraft Systems (UAS) or Remotely Piloted Aircraft Systems (RPAS) that are currently excluded from TCAS II. TCAS II is restricted to aircraft capable of achieving specified performance criteria.
TCAS is mandatory for most commercial aircraft and many business jets in many countries. It has significantly improved aviation safety and reduced the risk of mid-air collisions.